Robotique
Dans le cadre de ce module, nous avons pour but de construire des robots capable de jouer au "hockey". Puisque différents robots devait être construits, mon équipe fut mise en charge de planifier, fabriquer, programmer un robot autonome dans le but de remettre en jeux les balles qui se retrouverait dans une zone nulle.
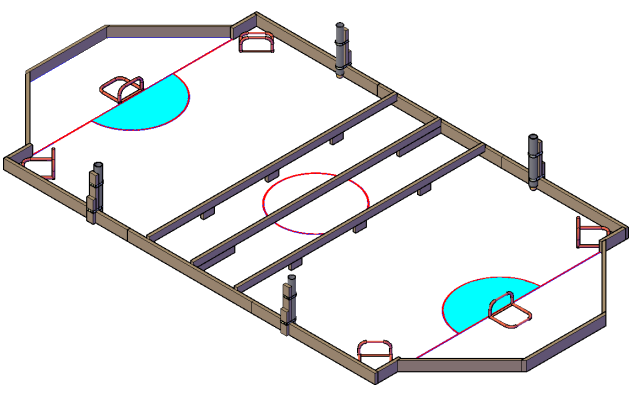

La première idée que nous avons eue était de bloquer l'entièreté du terrain à l'aide d'une barricade en ciseaux. Après délibération, nous avons conclu que ce serait la solution la simple et efficace à notre victoire, de plus les règles de la compétition ne l'empêchaient pas.
Nous avons par la suite été mis au courant que les créateurs de la compétition avait fait plusieurs erreurs dans leurs règles et que les plans que nous avions faits était invalide selon leurs "standard". Nous sommes donc retournés à la planche à dessin et sommes arrivé à une solution alternative. Bien qu'elle soit moins élégante, celle-ci ne devrait pas être refusée. Nous allons créer un robot capable de collecté les balles, et tout simplement de les renvoyer de l'autre bord.
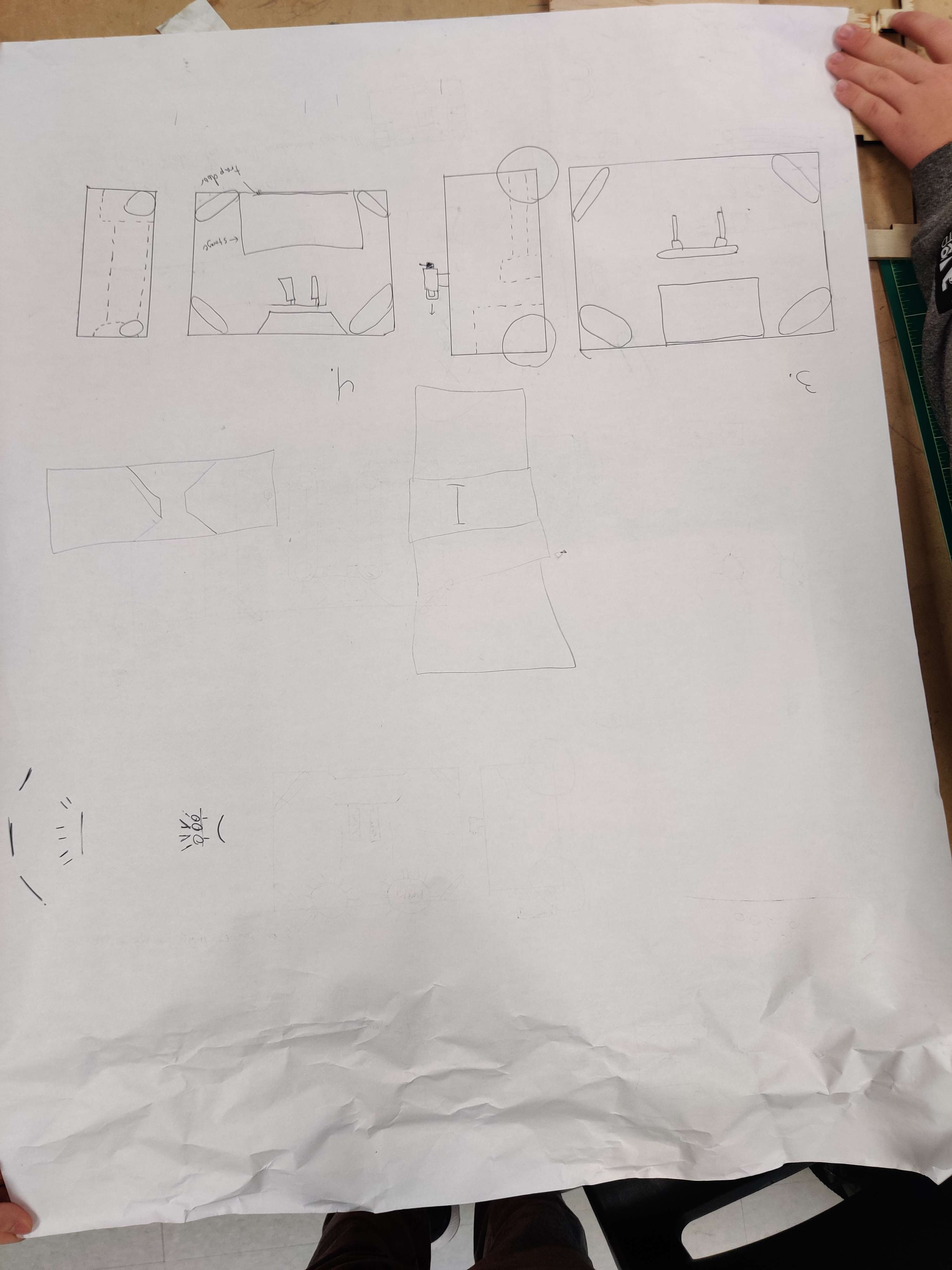
Voici les différentes idées que nous avons eues:
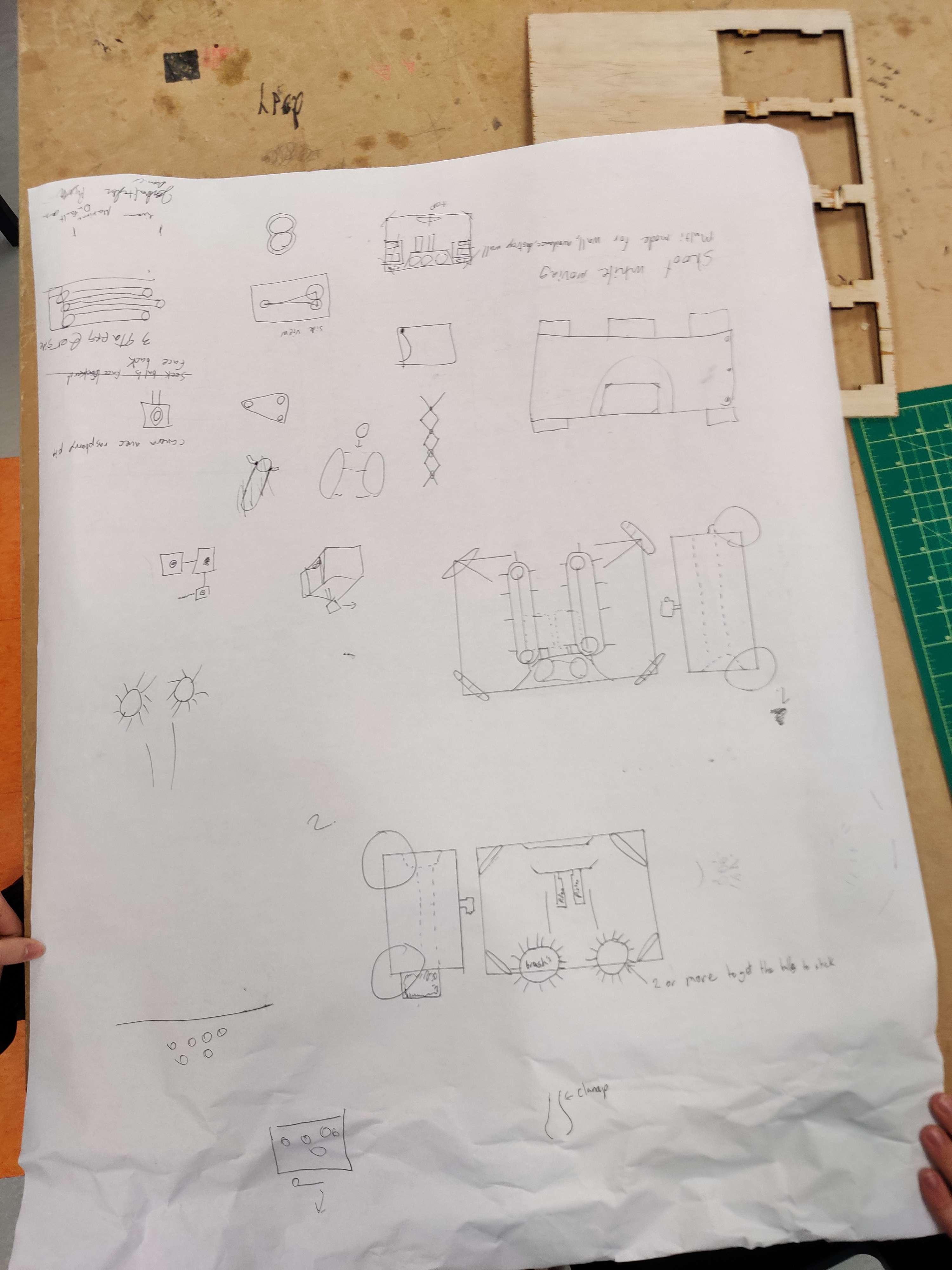
La simplicité était l'un de nos critères les plus importants alors, nous avons opté pour la réutilisation d'une plateforme faite au cours d'une compétition des années précédente.
Nous avons ensuite retiré tout ce qui fallait modifier/changer/amélioré.
C'est après cela que le vrai travaille a commencé, nous allions devoirs trouvés toutes les solutions par nous même et avoir un produit fonctionnel pour la compétition.
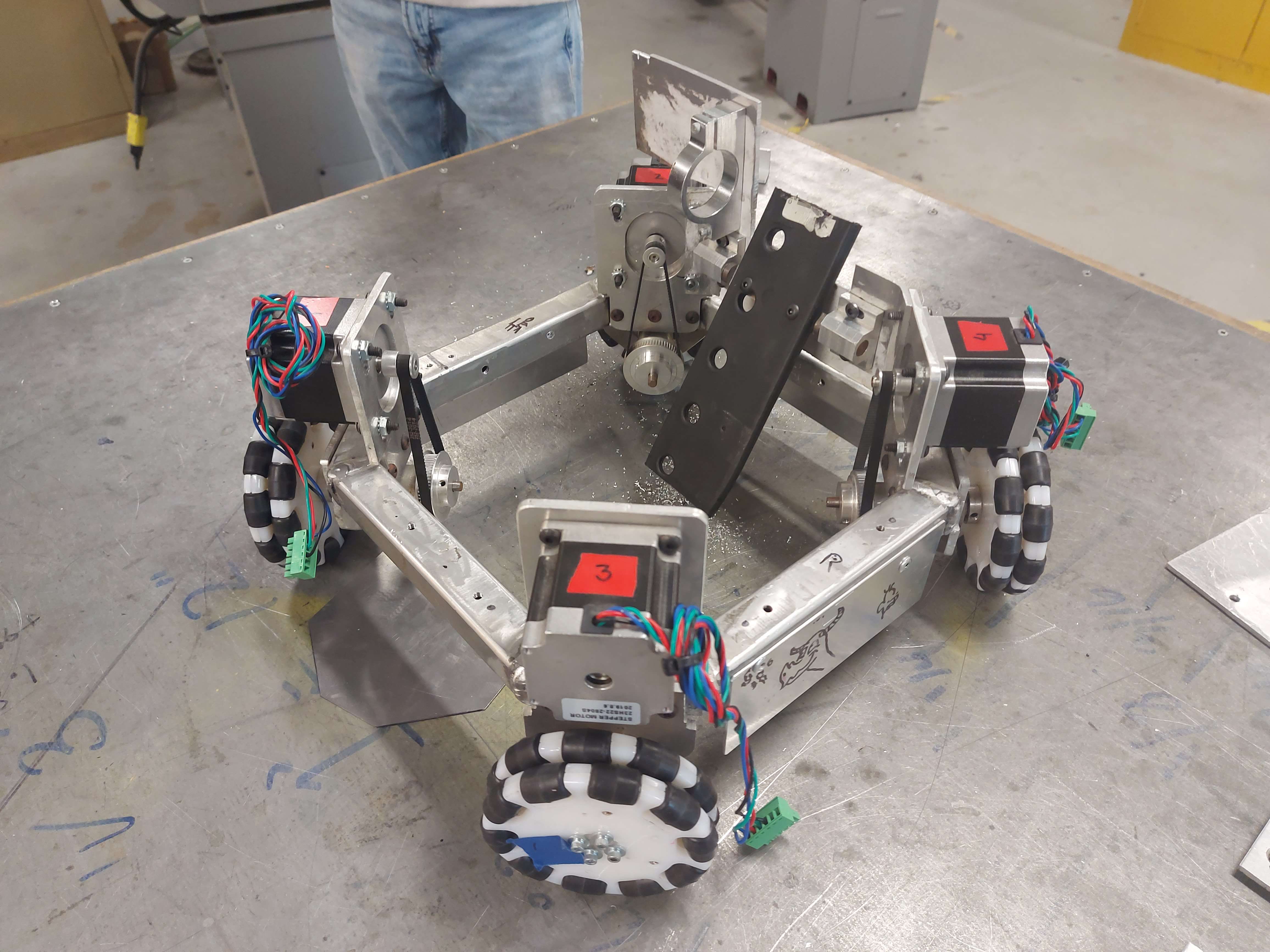
Ma partie était celle qui est déjà sur la photo du haut, un support à moteur ainsi qu'à palette. Voici le premier prototype.
Voici la pièce à laquelle je suis arrivé après avoir pris en compte les problèmes de l'autre et consulté mon équipe.
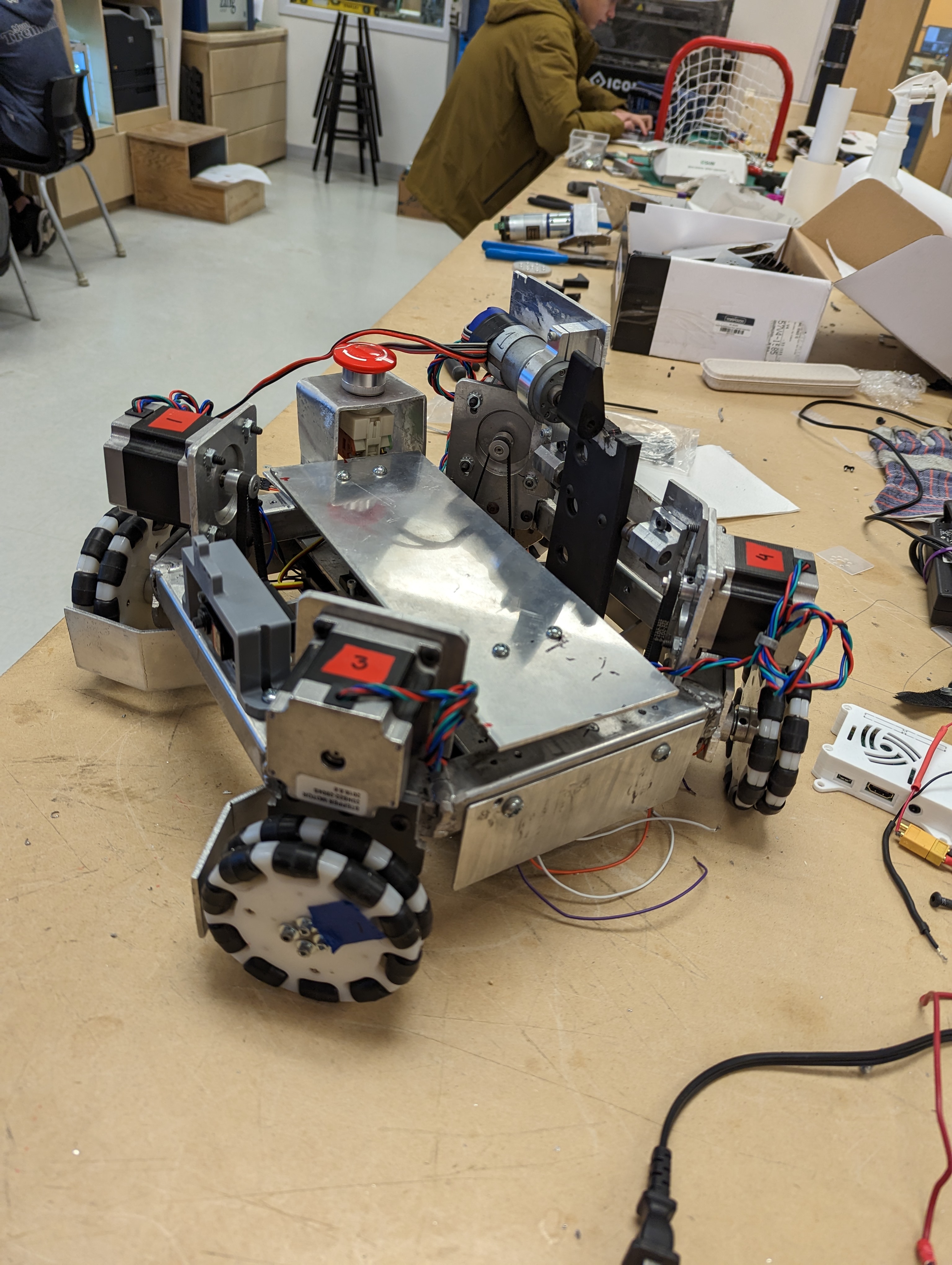
Voici la pièce finale sur le robot presque complété. Celle-ci est hors du chemin et permettrait l'ajout d'autres composantes au besoin.